
(sewlia@kth.se) |
I am a Motion Planning Engineer at NEURA Robotics GmbH. My work focuses on planning and control for complex robotic systems, with an emphasis on coordinated multi-robot manipulation and contact-rich interactions. I am interested in modelling manipulation as a hybrid dynamical system and in bridging optimisation based planning with real world robots.
Education:
Resume (Dec 2025) |
Recent Projects
-
Trajectory Tracking for Multi-Manipulator Systems in Constrained Environments
-
Leader-Follower Cooperative Manipulation Under Spatio-Temporal Constraints
-
MAPS2: Multi-Robot Anytime Motion Planning under Signal Temporal Logic Specifications
-
Cooperative Sampling-Based Motion Planning under Signal Temporal Logic Specifications
-
Cooperative Object Manipulation under Signal Temporal Logic Tasks and Uncertain Dynamics
-
Generating and Optimizing Topologically Distinct Guesses for Mobile Manipulator Path Planning
-
Cooperative control of heterogeneous multi-agent systems under spatiotemporal constraints
-
Bearing-Based Formation Stabilization Using Event-Triggered Control
-
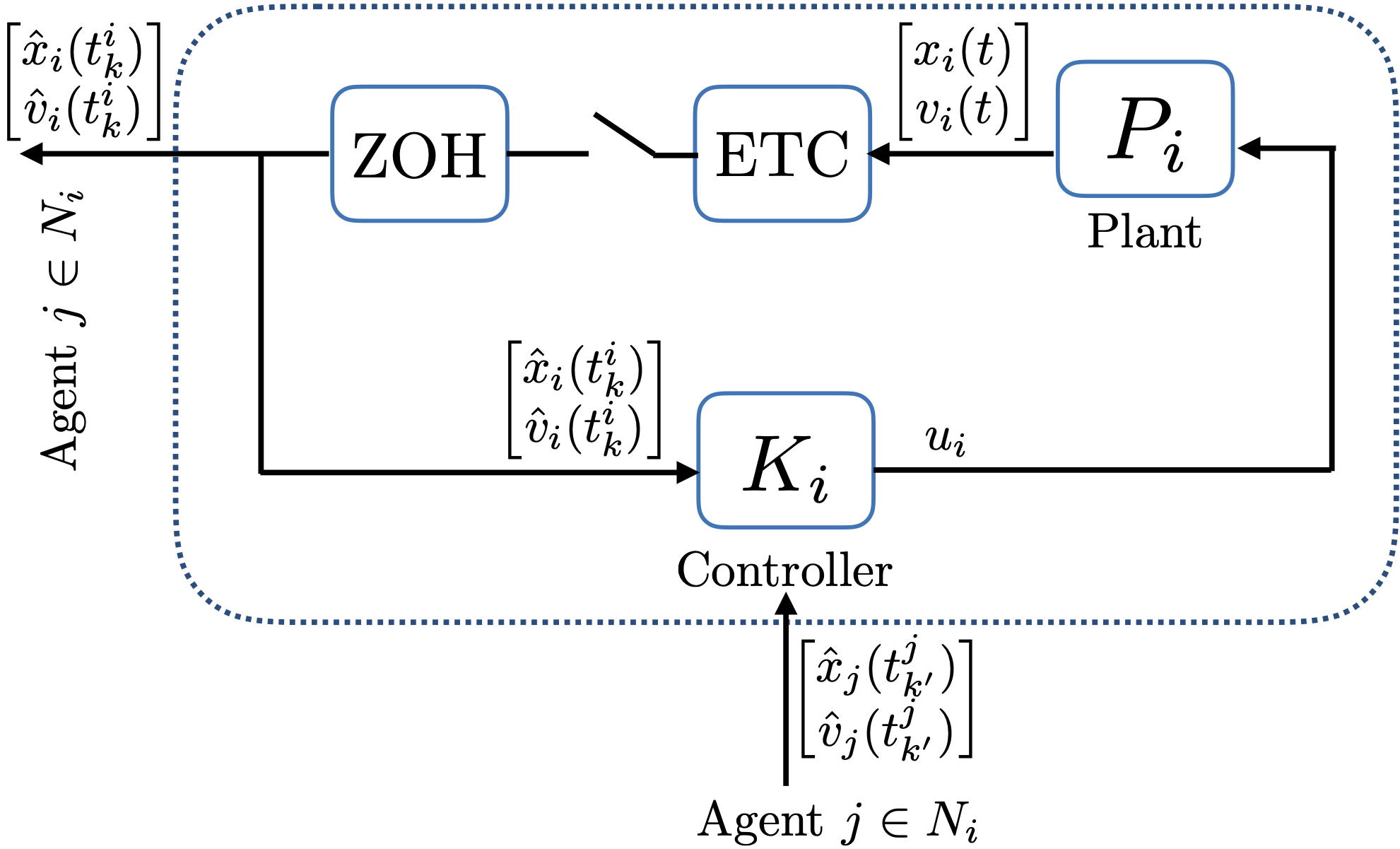
Distributed Event-Based Control for Second-Order Multi-Agent Systems
In addition to my work, I enjoy various physical activities, such as rowing, running, biking, and playing badminton. I have recently taken up learning to play the piano and have a soft corner for English literature.







